Starting in 2024, SATS data are complemented by observations collected by two gliders, which expand both the temporal and spatial resolution of sampling, as well as the range of chemical and biological variables measured at the observatory.
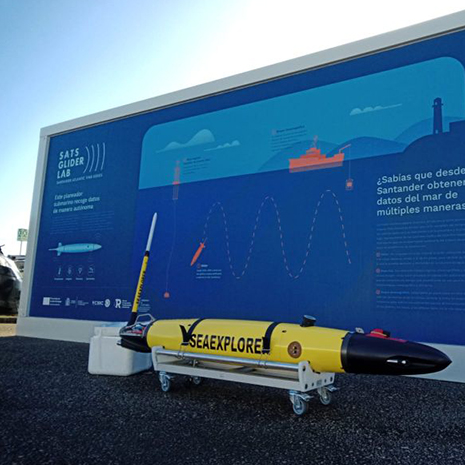
A glider is an autonomous underwater vehicle equipped with oceanographic and biogeochemical sensors that travels through the ocean collecting data and transmitting them to shore via satellite. Thanks to its low energy consumption, it can cover thousands of kilometers over several weeks autonomously, while being remotely supervised from land. Once a mission has been programmed, the glider is deployed at sea, where it moves in a dives (yo-yo) pattern from the surface down to depths of up to 1,000 meters, collecting physical and biogeochemical observations of the ocean. At regular intervals, it surfaces to transmit its position and data via satellite. At the end of the mission, the glider is recovered at its last reported position. The gliders are named Jimena and Juan. Jimena pays tribute to Jimena Quirós, the first Spanish oceanographer, who was already studying the waters off Santander in 1932. Juan honors Juan de Santander, also known as Juan de Cueto, one of the few sailors who survived the first circumnavigation of the globe led by Ferdinand Magellan and Juan Sebastián Elcano.
From the LAB facilities located in the Corbanera neighborhood, gliders are controlled, monitored, and maintained.
Explore the data visualization obtained from our gliders.
A glider has no propeller or internal motor. Instead, it uses a pump and a buoyancy bladder—similar to that of fish—to change its buoyancy, allowing it to ascend and descend through the water column. This vertical movement, combined with the ability to shift the position of the internal batteries, enables the glider to move through the ocean in a dive (yo-yo) trajectory with minimal energy consumption. Glider missions are designed prior to deployment, including parameters such as route, target depth, ascent and descent rates, and the type of data to be collected and transmitted. Once deployed, gliders are piloted remotely from shore, where mission parameters can be adjusted if needed. Communication with the glider via satellite is bidirectional: the glider transmits collected data to shore, while updated mission parameters can be sent from land, received, and acknowledged by the vehicle.
PARAMETER
FEATURES
PARAMETER
Dimensions
FEATURES
0.25 x 2 m + 1 m antena
PARAMETER
Wingspan
FEATURES
56.5 cm (sin alas)
PARAMETER
Weight
FEATURES
59 kg (en aire)
PARAMETER
Communications
FEATURES
GPS / Satélite (Iridium) / Radio / Triple antena
PARAMETER
Navigation Modes
FEATURES
Survey / Virtual mooring / Drifting / Bottoming
PARAMETER
Safety
FEATURES
Drop weight release and strobe light. OPTIONAL: ULB and/or Argos
PARAMETER
Hardware Architecture
FEATURES
Two independent low-power CPUs (payload and navigation)
PARAMETER
Maximum Depth
FEATURES
1000 m
PARAMETER
Ballast Volume
FEATURES
1000 ml (± 500 ml)
PARAMETER
Speed
FEATURES
Normal 0.5 kt / Máximo 1 kt
PARAMETER
Battery
FEATURES
Li-ion recargable
PARAMETER
Endurance (range/duration)
FEATURES
~1700 km (110 days). Endurance depends strongly on sensors, sampling strategy, and mission environment
PARAMETER
General Features
FEATURES
Up to 6 sensors in two sections (wet and dry): 9 L / 8 kg
Altimeter
Open-source firmware (C++) / Independent Linux CPU