A los datos de SATS se unen en 2024 los datos recogidos por dos gliders, que amplían las frecuencias temporales y espaciales de muestreo, y el tipo de variables químicas y biológicas medidas en el observatorio.
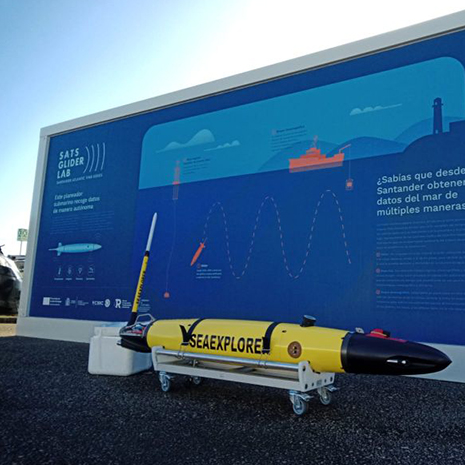
Un glider es un planeador submarino autónomo equipado con sensores oceanográficos y biogeoquímicos que recorre el océano tomando datos y enviándolos a tierra vía satélite. Debido a su bajo consumo de energía, puede recorrer miles de kilómetros durante semanas de manera autónoma, supervisado de forma remota desde tierra. Una vez que se ha programado su misión, el glider es desplegado en el mar, donde se desplazará realizando movimientos ondulantes desde la superficie hasta profundidades de 1000 m, recopilando observaciones físicas y biogeoquímicas del océano. Cada cierto tiempo sale a superficie y envía su posición y datos vía satélite. Una vez terminada la misión, el glider se recupera en la última posición enviada.
Los gliders se apodan ‘Jimena’ y ‘Juan’. ‘Jimena’ rinde homenaje a Jimena Quirós, la primera oceanógrafa española, quien en 1932 ya investigaba las aguas frente a Santander. ‘Juan’ recuerda a Juan de Santander o Juan de Cueto, uno de los pocos marineros que sobrevivieron a la primera circunnavegación del planeta, capitaneada por Fernando de Magallanes y Juan Sebastián Elcano.
Desde el LAB ubicado en el Barrio Corbanera se hace el control y mantenimiento de los gliders.
Explora la visualización de datos obtenido a través de nuestro glider
Sin propulsor ni motor interno, el glider utiliza una bomba y una vejiga natatoria, similar a la de los peces, para cambiar su flotabilidad, lo que le permite ascender y descender en la columna de agua. Este movimiento vertical unido a la posibilidad de desplazamiento de las baterías que aloja en su interior hace que pueda desplazarse en el océano siguiendo movimientos ondulantes con un mínimo consumo de energía. Las misiones de los gliders se diseñan antes de su despliegue (ruta, profundidad, velocidad de descenso y ascenso en la columna de agua, datos a recoger y enviar, …). Una vez en el agua son pilotados desde tierra modificando los parámetros de su misión si es necesario. Así la comunicación con el glider vía satélite es en dos direcciones: el glider se comunica con tierra para enviar los datos recogidos, y desde tierra pueden enviarse y modificarse los parámetros de la misión, que son recibidos y reconocidos por el glider.
PARÁMETRO
CARACTERÍSTICAS
PARÁMETRO
Dimensiones
CARACTERÍSTICAS
0.25 x 2 m + 1 m antena
PARÁMETRO
Envergadura
CARACTERÍSTICAS
56.5 cm (sin alas)
PARÁMETRO
Peso
CARACTERÍSTICAS
59 kg (en aire)
PARÁMETRO
Comunicaciones
CARACTERÍSTICAS
GPS / Satélite (Iridium) / Radio / Triple antena
PARÁMETRO
Modos de navegación
CARACTERÍSTICAS
Survey / Virtual mooring / Drifting / Bottoming
PARÁMETRO
Seguridad
CARACTERÍSTICAS
Liberador de peso y luz estroboscópica
OPCIONAL: ULB y/o Argos
PARÁMETRO
Arquitectura
CARACTERÍSTICAS
2 CPU independientes de bajo consumo para carga útil y navegación
PARÁMETRO
Profundidad máxima
CARACTERÍSTICAS
1000 m
PARÁMETRO
Volumen de ballast
CARACTERÍSTICAS
1000 ml (± 500 ml)
PARÁMETRO
Velocidad
CARACTERÍSTICAS
Normal 0.5 kt / Máximo 1 kt
PARÁMETRO
Batería
CARACTERÍSTICAS
Li-ion recargable
PARÁMETRO
Autonomía (duración)
CARACTERÍSTICAS
~1700 km (110 días) *La autonomía y duración dependen en gran medida de los sensores, la estrategia de muestreo y el entorno de la misión
PARÁMETRO
Características generales
CARACTERÍSTICAS
Hasta 6 sensores en dos secciones (húmeda y seca): 9L / 8kg
Altímetro
Firmware Opensource C++ / CPU Linux independiente
CSV comprimido (nativo)
Descarga de datos a través de cable
Ethernet externo (sin necesidad de abrir el vehículo)
Sensores
PARÁMETRO
FABRICANTE
MODELO
PARÁMETRO
Conductividad (mS/m)
Temperatura (°C)
Profundidad (dBar)